Nouvelle étude de multicoptère photographique.
Je conclus:
"Le temps de vol pour une machine de
4 Kg serait de 17 minutes 30 secondes (en utilisant 65% des 10Ah du pack LiPo).
Pour voler 15 min. il ne faut pas dépasser 4200 grs."
Je reprends donc mon étude d'un quadricoptère muni d'hélices 18x4 en commençant par faire une comparaison avec mon quadricoptère actuel dont le poids est maintenant de 3015 grs.
D'après mes calculs le temps de vol en stationnaire ŕ 65% des 8000 mAh est de +/- 16 minutes, ce qui est comparable aux valeurs attendues pour le quadricoptère équipé de 18x4. Sur base de la fameuse formule qui donne la traction statique en fonction du diamètre de l'hélice et de la puissance, j'espérais une efficacité dans le rapport des diamètres exposant 1,5.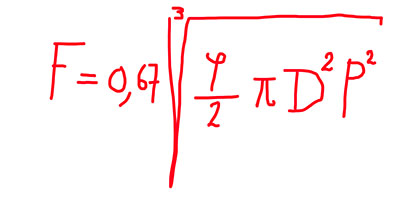 donc (18/13)1,5 = 1,38
donc (18/13)1,5 = 1,38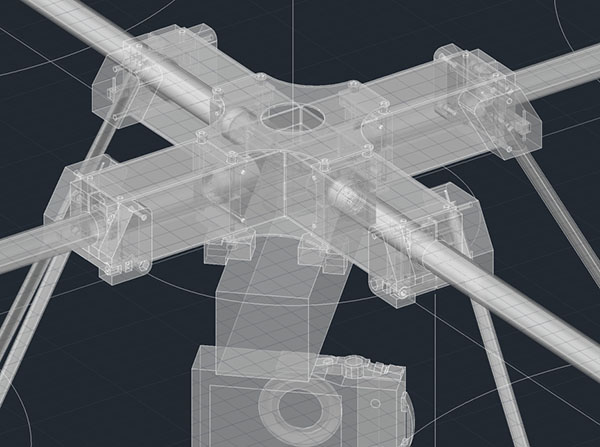
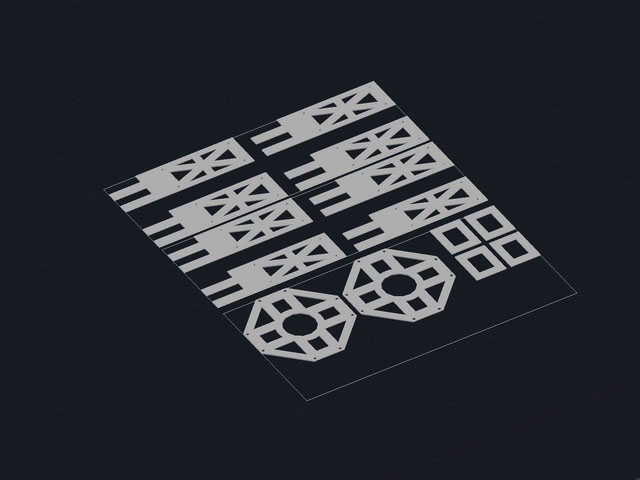
317 grs
de carbone, 203 grs de PLA, 43 grs de visserie, 652 grs de moteurs, 100 grs d'hélices,
100 grs de variateurs et 1189 grs de pack 6S 10Ah.
Nous en
sommes ŕ 2604 grs sans la nacelle et l'appareil photo. Ma nacelle actuelle pèse
+/- 140 grs et l'Olympus TG-4 pèse 250 grs.
Le défi
consiste maintenant ŕ tenter d'adapter une nacelle ŕ cardan brushless. Si le
poids max visé est de 4,2Kg, l'adaptation de la nacelle doit rester en dessous
de 4200 - 2604 - 250 = 1346 grs.
Il ne
fait aucun doute que c'est réalisable !!!! Je suis content content content
content !!!!
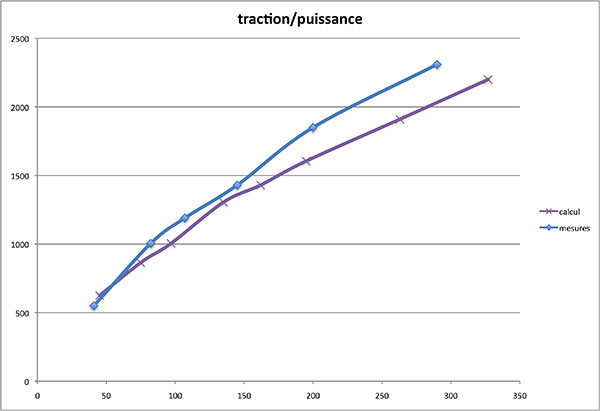
Le
rapport traction max/poids sera convenable aussi car lors de mes essais moteur
réalisé en 5S (18,5 volts), je n'ai pas osé pousser les gaz ŕ fond et j'ai
atteint 2310 grs pour 290 watts avec 18,13 A.
Le pack
Lipo sera un 6S (22,2 V), le moteur supporte 26 A et 720 Watts. Mes prévisions
étaient pessimistes car je devais avoir +/- cette traction de 2310 grs sous 23
A avec +/- 350 W.
Puisque
mes prévisions étaient d'obtenir 2500 grs sous 480 W avec 25,25 A, j'en déduis
qu'en 6S, j'atteindrai une traction suppérieure mais en tablant seulement sur
ces 2,5 Kg, mon rapport traction/poids sera au moins de 10 / 4,2 = 2,38. La
fourchette haute de ce rapport (en utilisant une nacelle de moins de 1346 grs)
est bien meilleure car ce type de nacelle pèse en général +/- 800 grs.
En
supposant que diverses adaptations seront nécessaires pour adapter le TG-4,
j'estime le poids ŕ 900 grs. Le quadri pourrait alors peser 3504 grs. Le
rapport traction/poids passe alors ŕ 2,85. Mieux, le temps de vol passe la
barrière des 20 minutes. Je suis content content content content !!!!
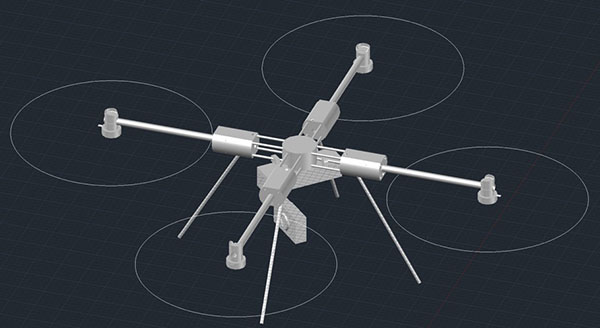
7 décembre 2017, mon dessin a bien avancé, voici une vidéo qui en montre la conception:
Cliquez dans l'image