Août 2018, Reconstruction du quadri 500.

Puisque le quadri a brulé, autant l'améliorer.
La nacelle de l'Olympus TG-4 était capricieuse, le passage en mode vidéo était aléatoire, il falait parfois répéter la commande, c'est arrangé. Il a fallu refaire l'impression des pièces de renvoi à 90°.
La conception du fuselage a été revue avec des découpes visant à l'aléger.
Les pièces en bakélite ont été remplacées par des pièces imprimées en PLA.
Parmi les mauvaises nouvelles apparues après le crash, les fils, d'un des moteurs ont été arrachés assez près des bobinages pour rendre la réparation hazardeuse et j'ai racheté un Multistar 4225-390KV qui a changé de couleur et dont les alésages de fixation sont différents. J'ai donc été obligé de réaliser deux pas de vis M3 à la base du stator. Lancée à la main, l'hélice de ce moteur est freinée rapidement, contrairement à celles de l'ancienne version du moteur. J'espère que cela ne m'obligera pas à racheter 3 autres moteurs. J'ai aussi constaté que le test de sens de rotation des moteurs du logiciel assistant montre qu'un de mes variateurs réagissait bizarement: l'hélice était lancée bien moins fort et de temps à autre faisait un mouvement dans le sens contraire d'environ 5 mm. Je pense même que la vraie cause du crash n'était pas un desserrement d'hélice mais le mauvais fonctionnement du variateur. En effet, l'hélice à pas inversé située sous le moteur ne peut dévisser le nez d'hélice que si le moteur est freiné brutalement. Tout blocage de l'hélice resserre le nez. Y-a-t-il eut freinage du moteur par le variateur? La seule chose certaine est qu'il faut changer ce variateur.
Je comptais racheter un pack LiPo Multistar 6S ,8 ou 10 AH mais il n'y en avait pas et j'ai choisi un pack Graphène dont la hauteur est plus grande, il a donc fallu abaisser la nacelle photo et changer tous les tubes en carbone, maintenant plus long. Cela a aussi imposé la réalisation de nouvelles pièces de suspension en PLA.
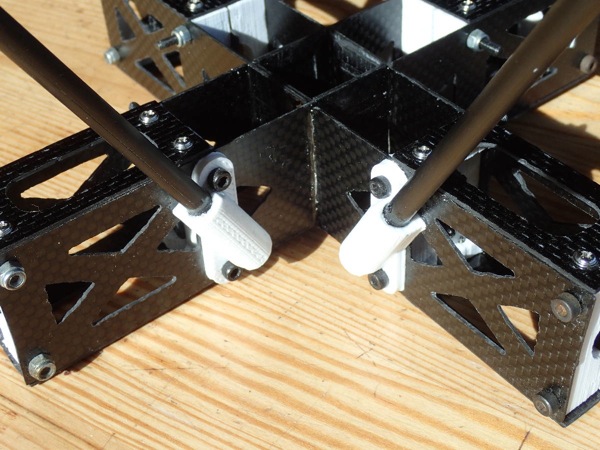
De nouvelles pièces ont été remplacées ou ajoutées pour le train d'atterrissage dont des pieds articulés.

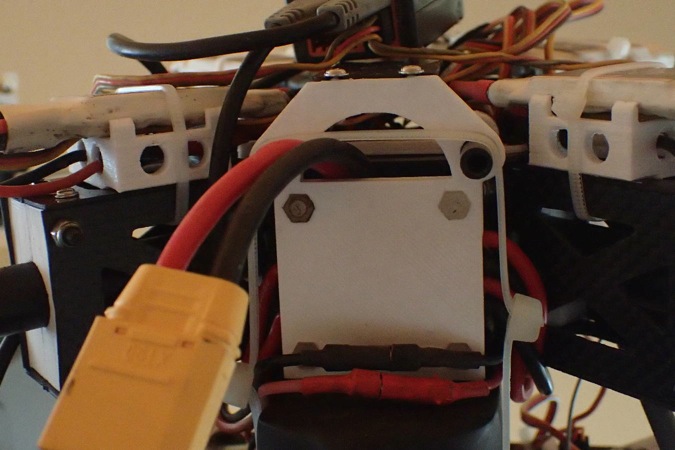
Les ESC sont maintenus dans des supports ajourés avec des serre-câbles.
Le hub de distribution de courant est accroché aux tubes de fixation du pack d'accus.
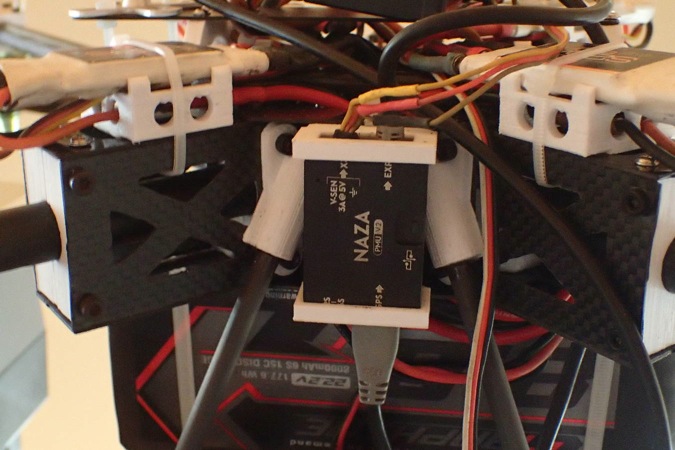
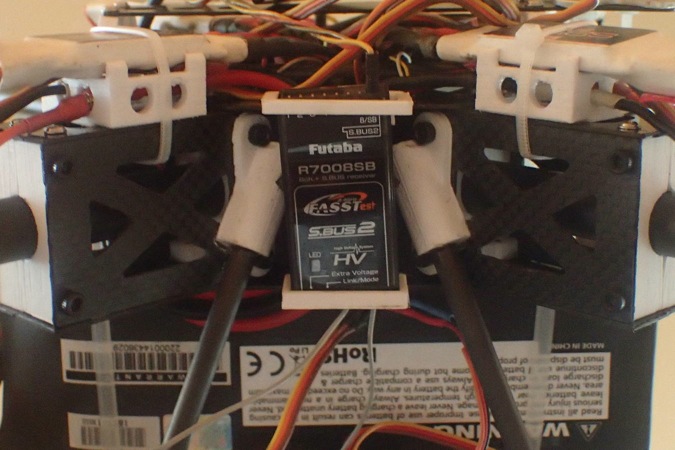
Une fixation spéciale reçoit le récepteur de commande de vol.
Quelques vols ont été effectués, la stabilité est bonne.
Voici les vidéos réalisées
le 15 août
 le 18 août
le 18 août
