8 février 2019, l'OSD fonctionne,
la fixation du cardan est réalisée.
Depuis le 20 octobre 2018,
j'attendais un OSD. J'ai attendu tellement longtemps que j'en ai commandé un
autre en début janvier 2019. Je les ai reçu à 3 jours d'intervalle à la
mi-janvier. Tout cela m'a fait prendre du retard dans l'avancement du quadri.
J'ai passé la seconde moitié de janvier à traduire « open source » et
sachez-le cela veut dire « démerde-toi ».
L'OSD
La programmation de l'OSD nécessite un convertisseur USB/TTL FTDI pour connecter l'OSD sur l'ordinateur. ---
http://blog.whatgeek.com.pt/2015/10/how-to-connect-ft232rl-ftdi-usb-to-ttl-serial-converter-to-minimosd-mavlink-osd/

Il faut aussi acheter Configurator (2,27), logiciel qui va servir à programmer l'OSD
https://www.virtualpilot.co.uk/index.php?route=product/category&path=62

Cela a l'air simple mais j'ai passé pas mal de temps à assimiler les connexions et la programmation de l'OSD malgré l'aide précieuse de Thierry Lahaye.
Après avoir programmé l'affichage des données que je souhaite avoir en vol, je remplace le câble en provenance du
convertisseur USB/TTL par celui en provenance du contrôleur de vol qui va distribuer les données via MAVLINK. C'est là qu'apparaît un nouveau problème:
la tension de batterie est toujours à zéro volt.
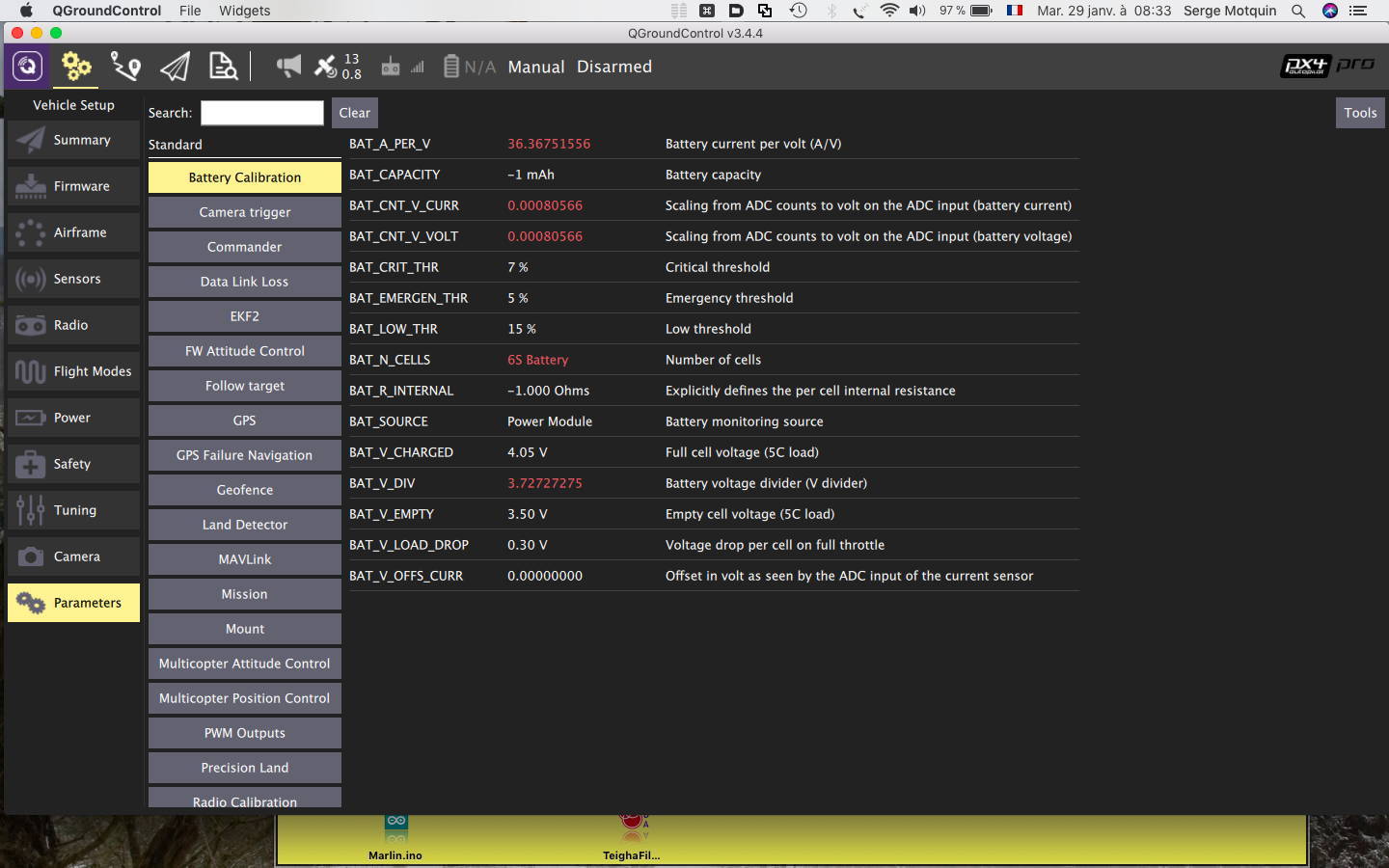
La carte d'alimentation du contrôleur de vol Pixhawk 4 dispose de 2 sorties qui fournissent également les
données de tension et de courant de batterie sur les bornes 3 (courant), 4
(tension), la masse est la borne 6. Ces données sont fournies sous la forme
d'une tension de 0 à 3,3 volts. Je pensais que mesurer les tensions m'aiderait
mais je trouve zéro volt. Ensuite, je place une pile de 1,5 volts sur le
contrôleur et je lis aussi zéro volt. Puisqu'il y a deux prises d'alimentation,
les bornes 3 et 4 devraient sans doute être reliées mais après vérification à
l'ohmmètre ce n'est pas le cas. C'est peut-être ça le problème ? Bon,
essayons sur la deuxième prise d'alimentation .... c'est pareil, zéro volt! Il
doit y avoir un problème hardware mais où serait donc cette panne? Après une
semaine de recherches exaspérantes, nous sommes fin janvier et je décide de
faire un break qui va durer deux jours.
Illumination!
Si les deux prises d'alimentation comportent des entrées de données de courant et tension qui ne sont pas
connectées entre-elles, c'est peut-être pour des sources d'alimentations différentes, redondantes. Dès lors, il doit y avoir une programmation à
réaliser pour les afficher et le problème est donc software! Je décide donc de vérifier en changeant de logiciel. J'opte pour le firmware Ardupilot dont j'ai
trouvé qu'il existait une version utilisable sous certaines conditions.
Miracle, cela fonctionne! Il faudra reprogrammer le contrôleur de vol mais c'est le prix de l'information.
Deux mois et trois semaines se sont écoulées depuis ma commande de l'OSD. Je mets à jour les versions de
QgroudControl et du firmware MSOSD et cela aussi fonctionne, l'ordinateur m'affiche la tension et le courant de batterie. Je vérifie dans mes lunettes
Skyzone l'affichage programmé et j'ai un stress car je vois « NO DATA » mais j'ai vite trouvé pourquoi. A force de changer de place les
câbles, j'ai fini par me rendre compte qu'il y avait de mauvais contacts au niveau de l'OSD qui empêchait les données Mavlink de passer. J'ai été amené à
redessiner la fiche imprimée 3D que j'avais mal conçue.
Le cardan
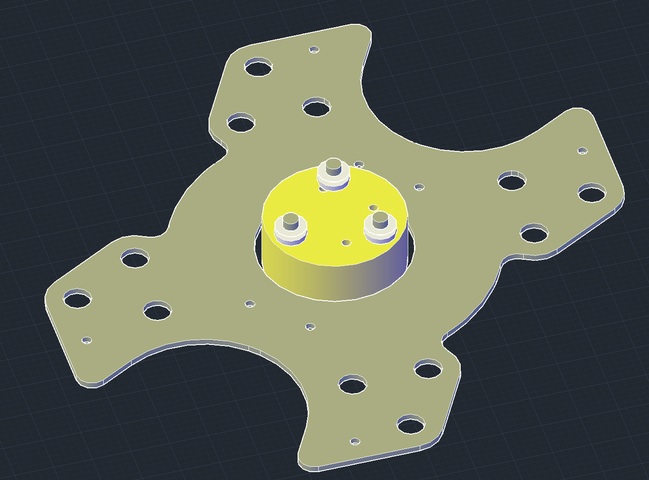
En deux jours, le projet va bien avancer. Je vais concevoir, dessiner et réaliser la fixation du cardan au quadricoptère. La fixation se fait par un seul levier
qui bloque les 3 diabolos attachés au moteur de lacet.
Une seule vis maintient le levier pour empêcher le déverrouillage.
cliquez dans l'image pour voir l'animation
Les diabolos sont fait en 2 pièces : une rondelle de 2 mm d'épaisseur et une autre de 3 mm d'épaisseur
avec un biseau à 45° sur 2 mm.
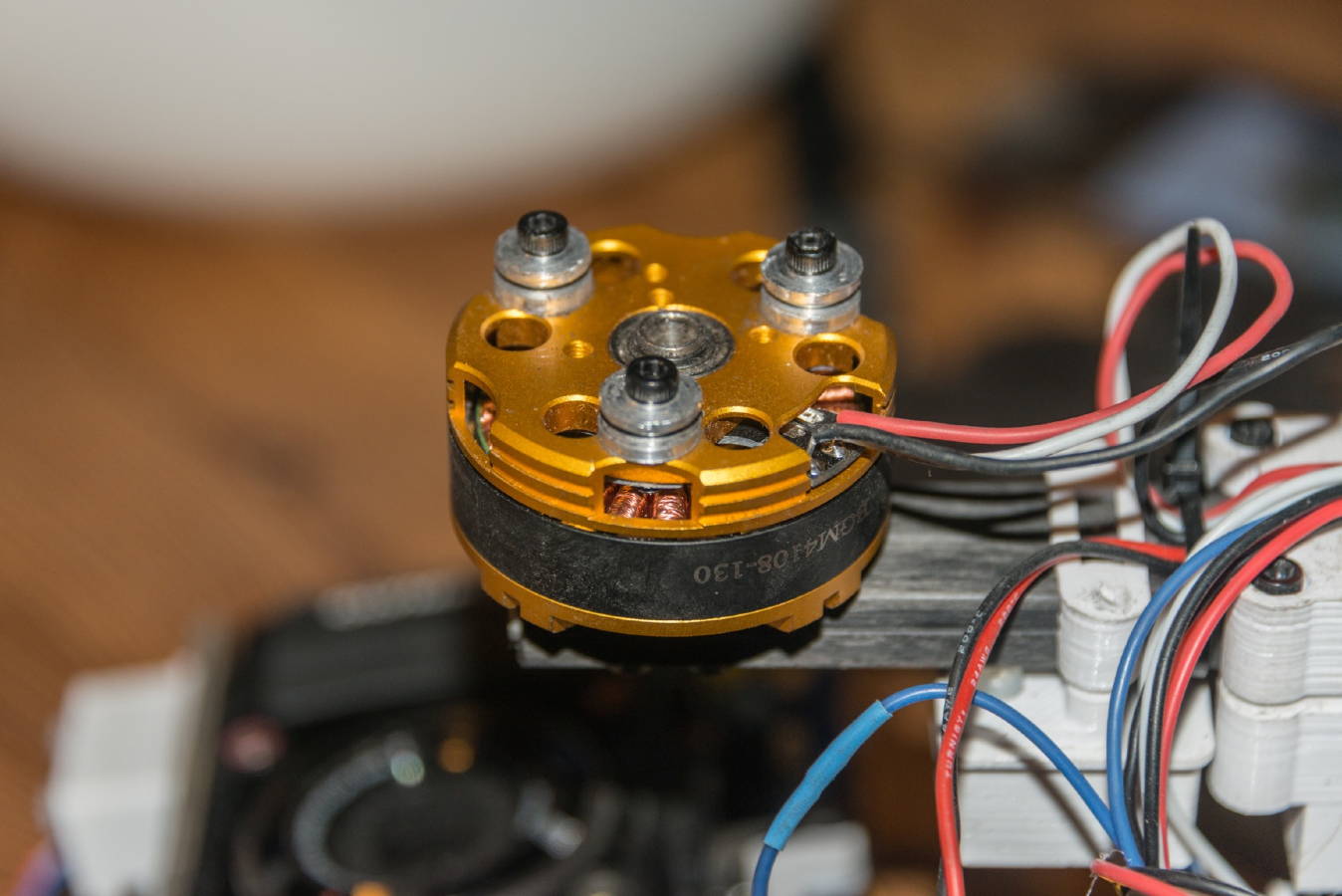
La pièce de verrouillage en carbone est découpée avec une machine CNC. Les biseaux sont réalisés à la Dremel.

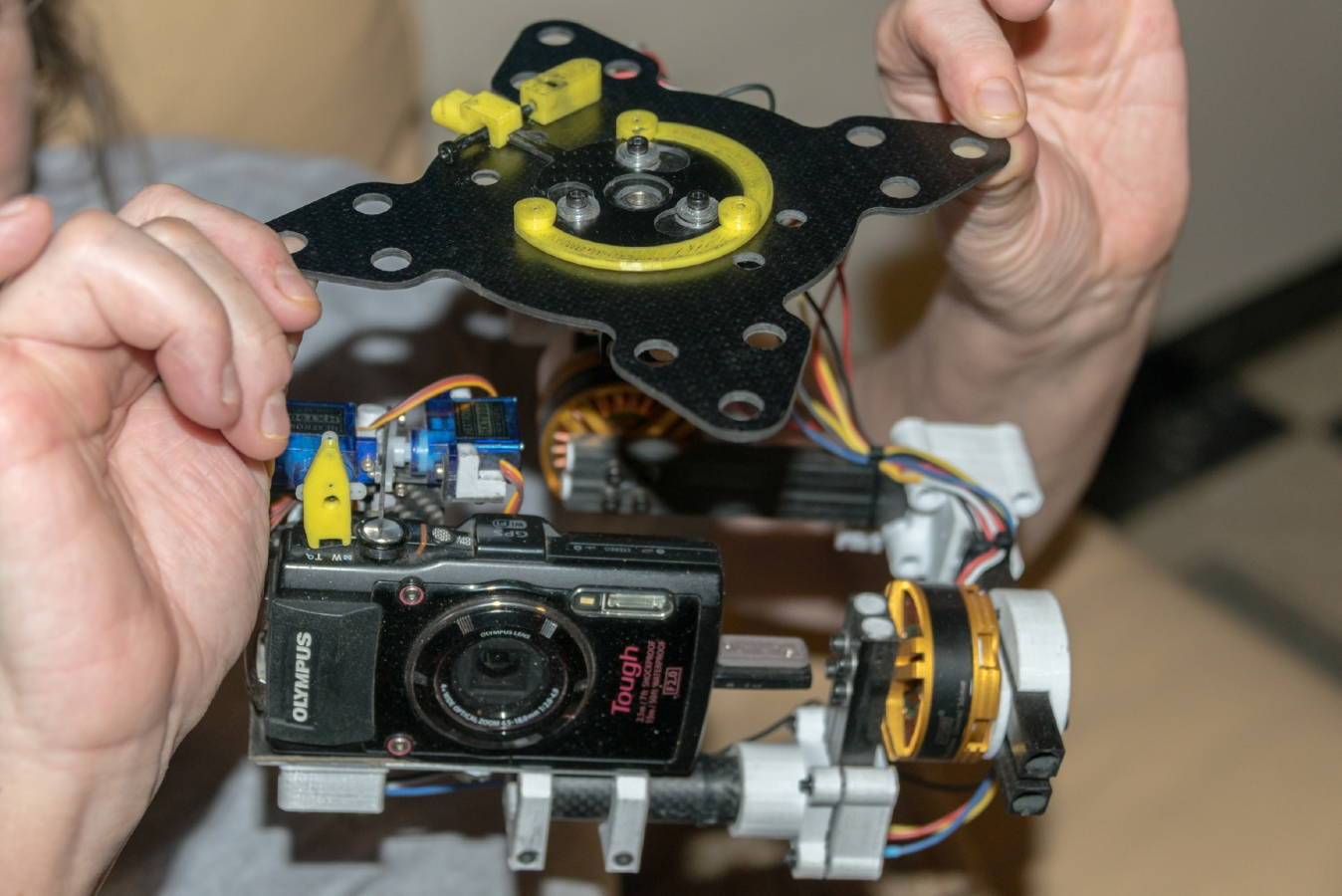
Il faudra sans doute améliorer le système pour rendre plus aisée la mise en place des diabolos du cardan en face
des orifices de la suspension et placer une butée au levier pour la position ouverte.
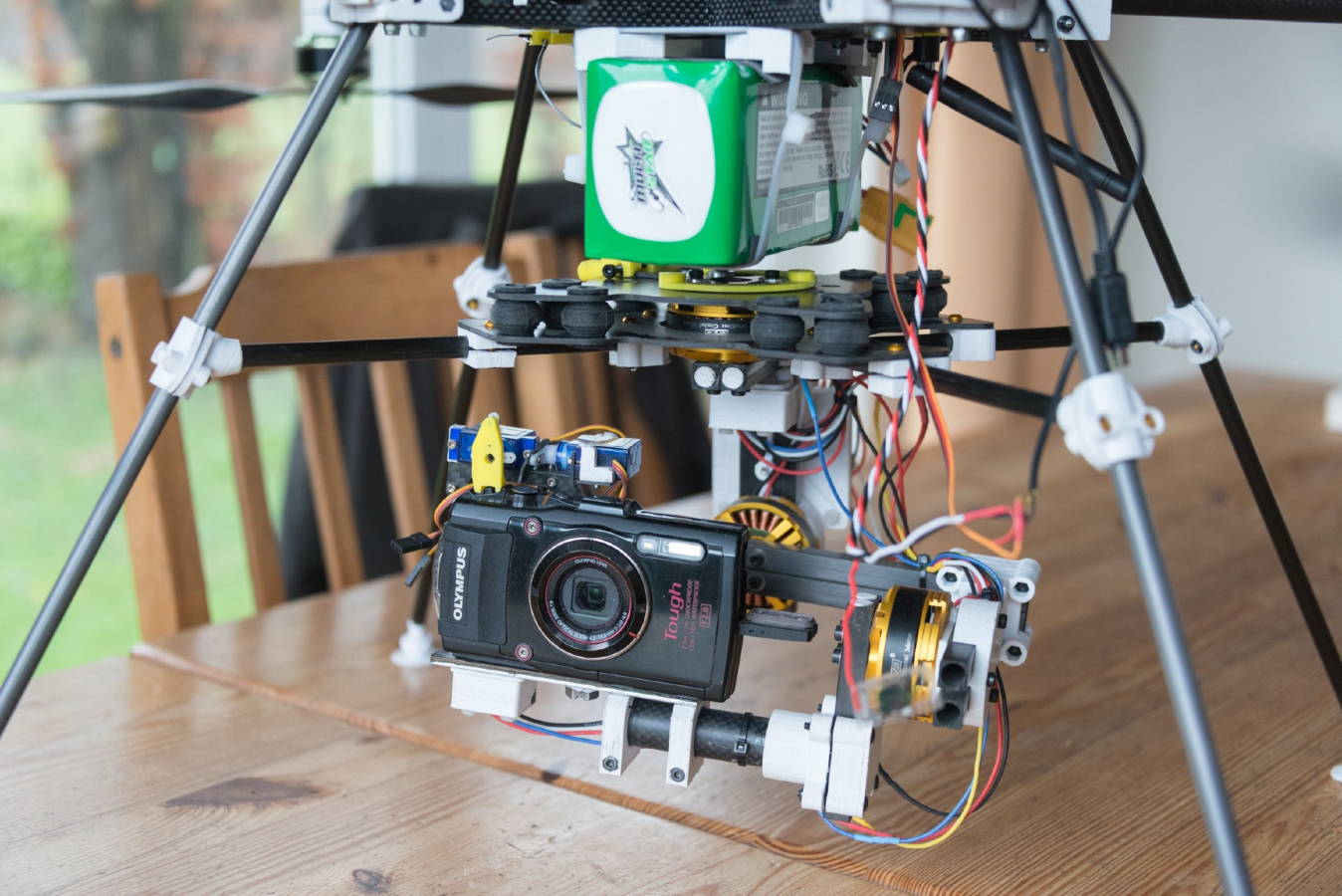
Il y a encore du travail pour ranger le câblage et programmer les mouvements du cardan et les commandes
de l'appareil photo.