27 février, le quadri 900 vole
assez correctement avec son cardan photo.
J'ai rangé le
cablage du cardan de manière à minimiser les efforts des moteurs. Les servos du
cardan commandent le zoom et le déclenchement photo ou vidéo. Les connexions
sur la carte Alexmos sont les suivantes:
| libellé
| via | fonction |
| SBUS | RC_ROLL | SBUS | SBUS |
| Servo 1 | FC_ROLL | canal 9 | zoom |
| Servo 2 | FC_PITCH | canal 10 | photo/vidéo ON/OFF |
| + 5V | AUX 1 | + 5V | Alim. servos |
Deux câbles relient le cardan à un connecteur du quadricoptère. L'un, à 4 conducteurs, assume les
fonctions du tableau ci-dessus. L'autre, à deux conducteurs, est celui qui
véhicule le signal vidéo de l'Olympus TG-4.
Le connecteur situé sur le quadricoptère est muni de 7 contacts répartis comme suit:
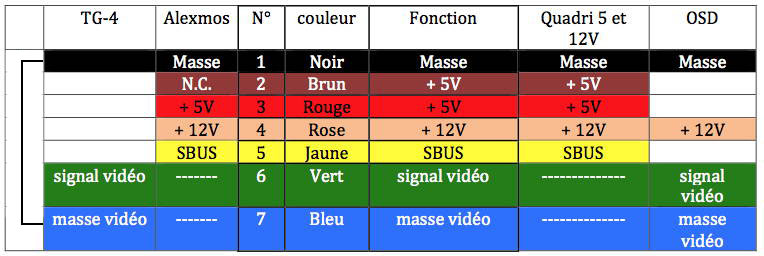
Les masses sont connectées entre elles au niveau du connecteur sur le quadricoptère.
L'alimentation 5V et 12V est une petite carte contrôleur de vol située sous
l'alimentation PM07 du Pixhawk 4.
Le premier vol (23/2/2019) a révélé une oscillation du quadri bien apparente sur la vidéo à 1 minute du début :
cliquez dans l'image pour la vidéo

http://www.motquin.be/modelisme/Dossiers/doc/2019_02_23_Q900_960x540.mp4
Le vol, à quelques mètres, en stationnaire la plupart du temps a montré que la consommation n'a pas dépassé
21,4 Ampères sous 23,4 Volts, soit 500,76 Watts et une efficacité de 117,82 Watts/Kg. Le pack Lipo étant de 10000 mAh, le temps de vol pourrait être de
28 minutes mais je ne souhaite pas décharger la batterie en dessous de 25%,
ce qui me donne tout de même un temps de vol approximatif de 21 minutes.

Il fallait donc faire disparaîtren cette oscillation. J'ai donc modifié les PIDs: augmenté P et I, et diminué D
progressivement. Le résultat n'est pas encore parfait car je suis novice en
cette matière mais je compte bien m'améliorer.