22 juin 2019, les PIDs du quadri 900 sont enfin réglés

J'en étais au réglage des PIDs lorsque la météo m'a empêché de poursuivre. Deux tempêtes m'ont fait passer de modéliste à bûcheron.
Le réglage des PIDs se fait à l'ordinateur, il faut donc utiliser un portable car la machine a un encombrement de 136 cm et 47cm de hauteur. Les vols d'essais comprennent des mouvements de tangage, de roulis et de lacet qu'il faut répéter de manière à pouvoir comparer les résultats à chaque modification. Les paramètres de chaque vol sont enregistrés sur la carte SD du contrôleur de vol. Après chaque vol, il faut transférer les données sur l'ordinateur et, ensuite, utiliser internet pour en obtenir l'interprétation sous forme de courbes. Ne disposant pas de Wifi sur le site de vol, la météo devient un élément très important car entrer et sortir de la maison avec la machine, la télécommande et l'ordinateur est un vrai travail. L'analyse à l'ordinateur prend du temps et il n'est pas souhaitable de laisser le matériel exposé à une éventuelle averse.
Tout cela explique en partie que le réglage des PIDs s'étale sur 4 mois, mais en partie seulement! J'ai mis pas mal de temps à comprendre pourquoi j'avais des oscillations à caractère aléatoire en tangage et en roulis. J'avais beau effectuer les modifications des paramètres selon la méthode prescrite, les oscillations persistaient. J'ai donc une nouvelle fois vérifié la signification de "open source": démerdes-toi !
Exemple:
La méthode parle d'oscillations haute fréquence qui se produisent lorsque . . . .
Mes oscillations sont-elles à haute fréquence? Cela ne veut rien dire !
Le "open source" a beaucoup d'avantage pour ceux qui baignent dedans depuis des années: les "geeks". Le "open source" est fait par des "geeks" pour des "geeks", ils mettent toute leur énergie dans la réalisation de leurs projets mais beaucoup moins pour se mettre au niveau des utilisateurs lambda.
Alors, voici l'explication:
Avant de régler les PIDs, il faut régler la puissance minimale des moteurs.
Pour cela, on enlève les hélices et on arme la machine pour que les moteurs tournent, ils ne doivent pas stopper quand on incline la machine de 60° (dans toutes les directions).
Le manuel en ligne dit qu'il faut régler la puissance au minimum mais, comme j'avais peur d'avoir de l'instabilité en descente (quand les hélices passent dans leurs turbulences), j'avais utilisé comme puissance minimale (9%). Je pense que c'était la valeur par défaut et comme les moteurs ne se sont pas arrêtés lors de mon test j'avais laissé cette valeur.
C'est cela qui a généré toutes mes difficultés pour régler les PIDs. Je l'ai compris après avoir repris tout depuis le début et finalement j'ai maintenant 1% pour ce paramètre.
J'utilise de grandes hélices à faible pas (18 x 4) et la puissance nécessaire au vol stationnaire est faible. Le contrôleur de vol avait peu de latitude pour baisser les régimes des moteurs, il devait donc réaliser les équilibres en augmentant le régime des moteurs opposés à ceux qu'il devait ralentir.
Les PIDs sont enfin réglés mais cela n'a pas été sans mal car j'ai effectué 19 relevés (logs des courbes) supplémentaires, ce qui m'en fait 65 au total.
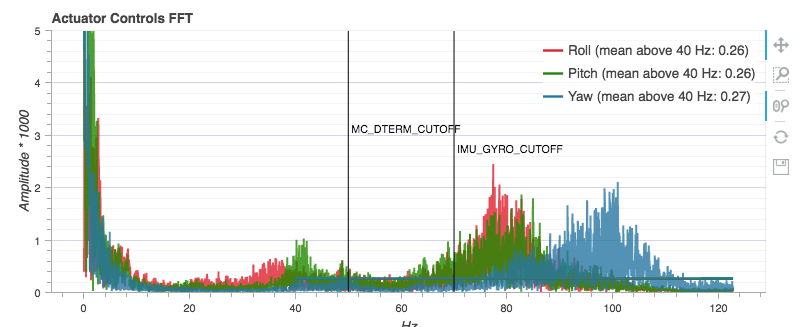
Voici les principales courbes:
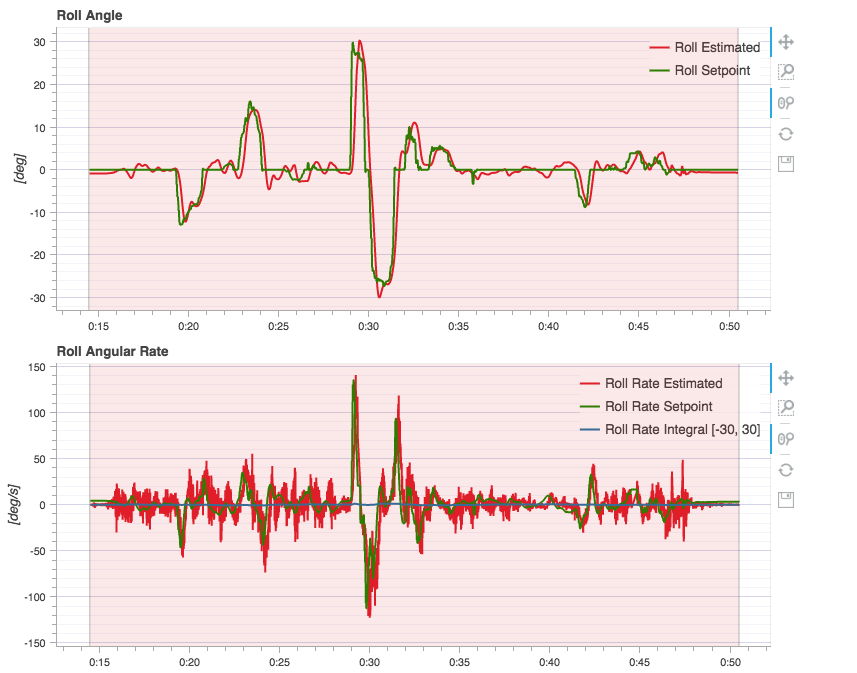
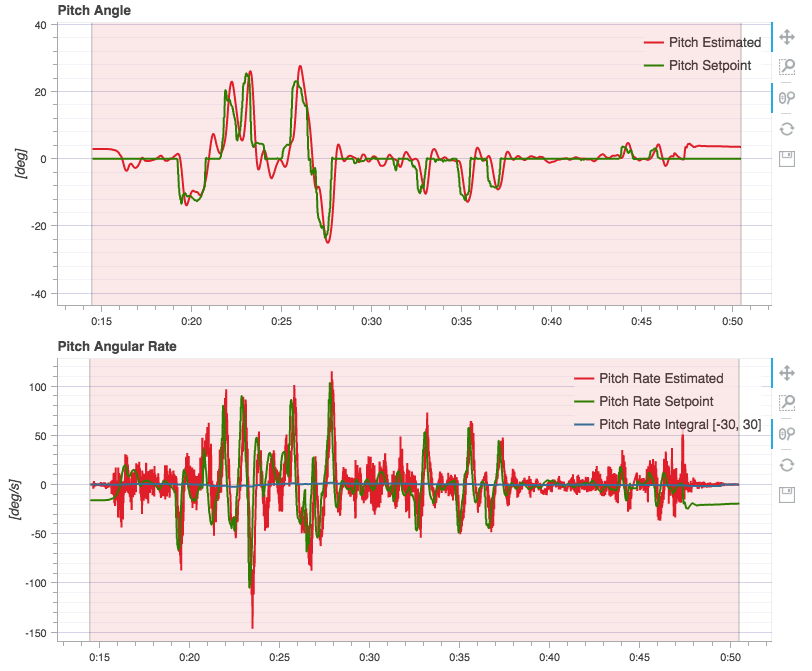
Bien sûr, il y a aussi le Yaw (lacet).
Je suis particulièrement satisfait de la consommation avec le quadri en pleine charge (avec cardan et appareil photo):
sur 36 secondes de vol stationnaire mais avec des inclinaisons jusqu'à 30° mon courant maximal a été de 23,1 Amp et mon courant moyen de 13,8 Amp.
Dans ces conditions, en utilisant seulement 70% de la capacité des accus, je peux voler 1/2 heure.
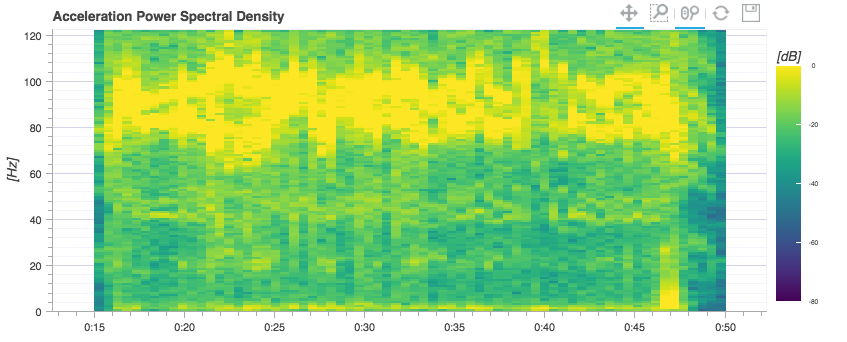
Je pense travailler encore sur la machine afin de diminuer les vibrations qui sont surtout dans l'axe de lacet: