Fin juin, alors que le réglage des PIDs est enfin terminé, je voulais faire un vol mais le contrôleur de vol me l'interdit.
Lorsque je branche l'alimentation, le cardan ne s'initialise pas et ne met pas l'appareil photo à sa position de départ. Je débranche la batterie et je fais une autre tentative mais le contrôleur signale par une led rouge son refus d'armer.
Je débranche la batterie et branche l'ordinateur pour récupérer le fichier dans lequel sont enregistrés les paramètres du vol mais cela s'avère impossible.
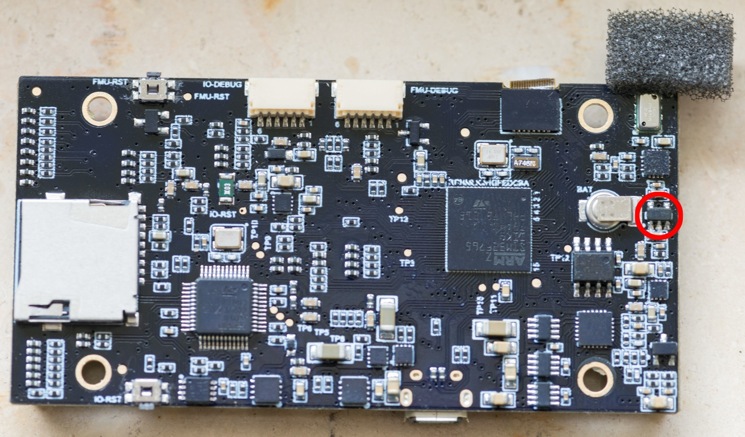
Le Pixhawk 4 a rendu l'âme! En effet, je constate qu'un circuit intégré est particulièrement chaud.
Je contacte donc Holybro, le fabricant, qui se montre coopératif. Après quelques échanges de courriels, le 15 juillet Holybro annonce que je recevrai sous garantie un Pixhawk 4 par DHL en express.
Le 1 août, je reçois un numéro de suivi, puis je reçois assez vite le contrôleur de vol car le 7 août je recontacte Holybro pour un nouveau problème.
J'avais installé le dernier firmware et introduit les paramètres. Je remarque que l'OSD ne reçoit pas les données de vol. Il n'est pas nécessaire que le cardan soit branché pour obtenir les données de vol car l'OSD et l'émetteur TV sont sous tension dès le branchement de la batterie. Je finis par obtenir l'affichage des données de vol par l'OSD après avoir chargé les paramètres de la version précédente du firmware que j'avais sauvés.
Je fais donc un essai en vol sans cardan et la machine se comporte normalement. J'installe alors le cardan mais lorsque je branche à nouveau la batterie c'est l'enfer! Le moteur 2 se met en route violemment et j'ai beaucoup de mal à débrancher la batterie. Voilà qui est inquiétant car chaque moteur peut produire une traction de 2,5 Kg.
Comme c'est la seconde fois qu'un problème se présente après avoir branché le cardan, je l'enlève pour voir si le problème disparaît mais c'est loin d'être le cas.
Je ne parviens pas à armer bien qu'ayant installer le dernier firmware avec les mêmes paramètres que lorsque tout fonctionnait. Je fais part à Holybro de mon découragement.
Je pense qu'il doit y avoir un lien avec l'installation du cardan et je décide de revoir toutes ses connexions, en particulier celles d'alimentation.
Voici le schéma:

Je vérifie ainsi que seule la masse est commune aux deux sources d'alimentation, celle du contrôleur et celle de la carte Alexmos du cardan, de l'OSD et de l'émetteur TV. Il ne devrait donc pas y avoir de problème au niveau de l'électronique.
Je constate tout de même que l'OSD fabrique un 5 volts et que le contrôleur fournit lui aussi 5 volts à l'OSD. Cela ne devrait pas poser de problème non plus mais je coupe tout de même le fil qui ne sert à rien.
Depuis le 12 août, mes échanges de courriel avec Holybro ne font pas avancer les choses. On me demande si mon OSD fonctionne bien mais j'en avais un deuxième qui donne le même résultat.
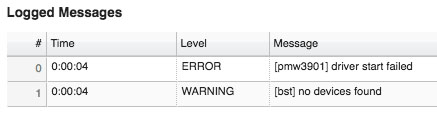
Le 17 août, je découvre que l'erreur [pmw3901] driver start failed correspond à l'initialisation d'une caméra basse résolution nommée pmw3901 venue du monde Arduino et qui sert à connaître une position par rapport au sol et aide à l'atterrissage. Je n'ai pas cette caméra et je n'en ai pas besoin. Je ne vois pas pourquoi j'obtiens cette erreur. J'apprend quelques rudiments d'utilisation de la console Mavlink dans QgroundControl ce qui me permet de vérifier que la commande pmw3901 existe avec des paramètres d'option comme start ou info.
Je trouve comment obtenir la liste des "devices" et, évidemment, pmw3901 ne s'y trouve pas.
Plonger les mains si profondément dans le cambouis a finit par m'exaspérer et je décide de reprendre tout du début en remplaçant PX4 par ArduPilot.
Le 18 août, MIRACLE, je peux maintenant armer le quadri mais j'ai de nouveau perdu les données de vol dans l'OSD.
Changer le firmware du contrôleur de vol nécessite forcément un nouvel étalonnage des capteurs et l'utilisation de paramètres un peu différents. Cela nécessite même de modifier les réglages de la télécommande car le canal 6 que j'utilisais pour le retour au point de décollage est réservé à la modification d'un paramètre dans ArduPilot. C'est une question que je dois encore examiner.
Je fais donc un essai en vol (sans cardan) avec ArduPilot mais la réaction aux commandes de gaz est beaucoup trop violente. Chaque fois que je remets un peu de gaz pour freiner à l'atterrissage le quadri remonte plus haut. Finalement, après un touché à une branche d'arbre, c'est le crash. Un des bras c'est enfoncé dans le sol, le moteur a glissé sur son bras porteur et les fils électriques sont coupés, deux petites pièces d'impression 3D sont à refaire. Je répare tout cela le jour même, je diminue la réaction aux commandes de gaz et le quadri vole enfin assez bien.
Le 20 août, j'ai enfin trouvé 8 paramètres à encoder pour obtenir l'affichage des données de vol par l'OSD. J'installe à nouveau le cardan pour faire un premier vol et tout fonctionne.
Le 21 août, je fais quelques plans vidéo avec le quadri
Cliquez dans l'image - 2'16" Quadri 900
